Die physikalische Verbindung zwischen dem ROBAR-Server und dem Archivsystem zur Steuerung der Robotik im Archivsystem ist hardware-abhängig:
Archivsysteme mit ABBA-Schnittstelle haben eine TCP/IP-Verbindung, siehe „Verbindungen an der ABBA-Schnittstelle“
Auf dem ROBAR-Server läuft als zentraler Prozess robar_abba ab. Er wird beim Start einer ROBAR-SV-Instanz gestartet. Bei Multiprocessing können bis zu zehn robar_abba-Prozesse je Archivsystem gestartet werden.
Jeder dieser Prozesse liest eine Meldung aus der Auftragsdatei und führt dann die zu dieser Meldungsnummer hinterlegten Aktionen durch. Diese sind im Allgemeinen Aktionen zur Ausführung im Archivsystem wie das Montieren einer Magnetbandkassette oder Aktionen zur Ausführung im BS2000-System wie das Beantworten einer Meldung. Die Aktionen zur Ausführung im Archivsystem werden an das Archivsystem übertragen, dort ausgeführt und quittiert.
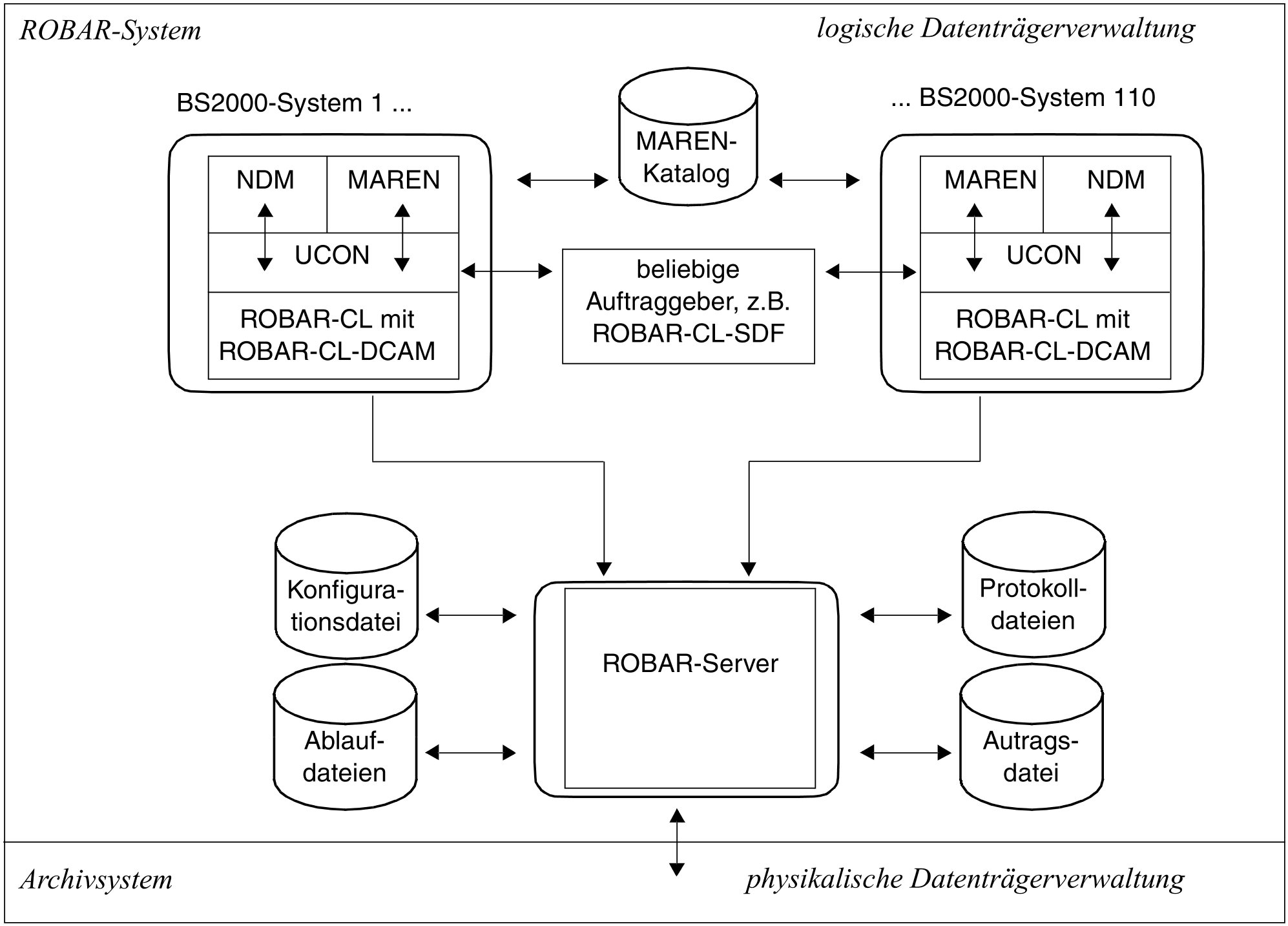
Bild 1: Kommunikation zwischen den Systemkomponenten