At the SCSI interface, connections between the ROBAR server and the archive systems require both a hardware installation (Host Bus Adapter (HBA)) and a software installation (lpfc driver) on the ROBAR server, see "Connections at the SCSI interface".
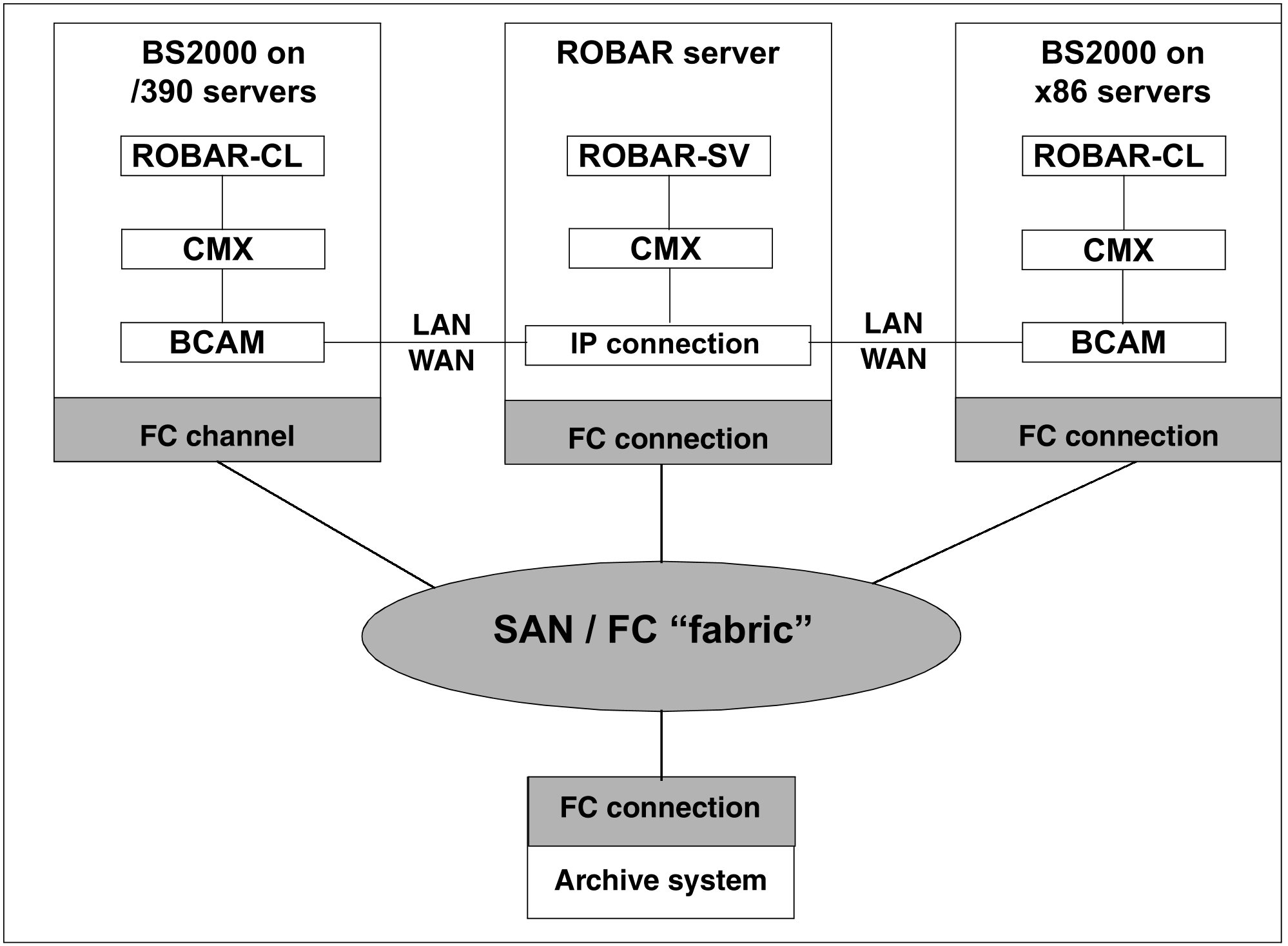
The BS2000 systems, the ROBAR server and the archive systems with a SCSI interface are connected to each other via an Enterprise Storage System (Storage Area Network, SAN). In the case of connections of the type “fabric”, dedicated connections are established between the servers and the archive systems. The servers and archive systems form domains which are assigned to each other via FC switches (“zoning”).
The hardware connections consist of
FC connections from the BS2000 systems to the SAN (data transfer),
an FC connection between the Host Bus Adapter (HBA) on the ROBAR server to the SAN (control of the robotics),
FC connections from the SAN to the devices of the Scalar i500 archive system or to the I/O blade of the Scalar i6000 archive system.
Information on LTO devices connection (direct or via I/O Blade) is found in the Release Notice.
Information on system generation of a SAN is provided in the “System Installation” manual [4]. You can check the SAN configuration in the SE Manager → FC networks.
Installation and configuration on the ROBAR server
Systems support must install the controller hardware, the “Host Bus Adapter” (HBA), on the ROBAR server. Before the HBA is installed, the lpfc driver must be installed (without a reboot).
After the lpfc driver has been installed, the Linux operating system automatically configures the lpfc driver when the ROBAR server is rebooted. When this reboot takes place, the SAN connection of the ROBAR server with the archive systems which are to be controlled (“zoning”) must be available and the archive systems must be operating.
Persistent device nodes
In ROBAR what are known as persistent device nodes will be configured for archive systems.
When configuring ROBAR-SV enter the /dev/rob/<library_serial_number> file name in the configuration parameter robot_address1 (see "Sample of the interface-specific configuration file (SCSI interface)").
robot_address1 can be the following:
fully qualified file name of the “device special file” (e.g.
/dev/sg3)fully qualified file name of the persistent device node resp. serial number of the archive system concerned or of a partition of it (e.g.
/dev/rob/1ADIC_203100195_LL5)
When the ROBAR server is rebooted, ROBAR-SV and the Linux subsystem udev use a symbolic link to ensure that the persistent device node is always assigned to the right device special file. As a result, the configuration files are not affected by changes in the SAN connections.