Application area: SCSI and ABBA interface
If you select MANUAL, you branch to a menu in which the archive system commands and the BS2000 command /UNLOAD-TAPE can be entered manually. The archive system commands apply for the archive system which manages the ROBAR-SV instance selected in the INSTANCES menu.
The archive system commands available differ according to the interface. Commands which have been marked accordingly are listed in the last line (see "Short description of the archive system commands"). The commands can be varied using operands (see "File roboter_cmds").
The selected command is displayed together with its operands, e.g. the archive system command MO:
<M011,MO , ,FFFF,1,r,0mm,vvvvvv,ss,AAAAAAAA,BBBBBBBB,UUUUUUUU>
You must modify the operands (written in lower case) (see "General notes on the archive system commands") and confirm with [ENTER]. The command is then sent, suffixed with the current time, to the archive system (the /UNLOAD-TAPE command to the corresponding BS2000 system), where it is executed.
Both the archive system commands and the archive system return messages are logged in the scroll area (lines 3 - 23 on the screen). The archive system acknowledges whether the command was successful or not. If it was unsuccessful, an error code is also output.
You can cancel a selected archive system command by pressing [Ctrl]+[C].
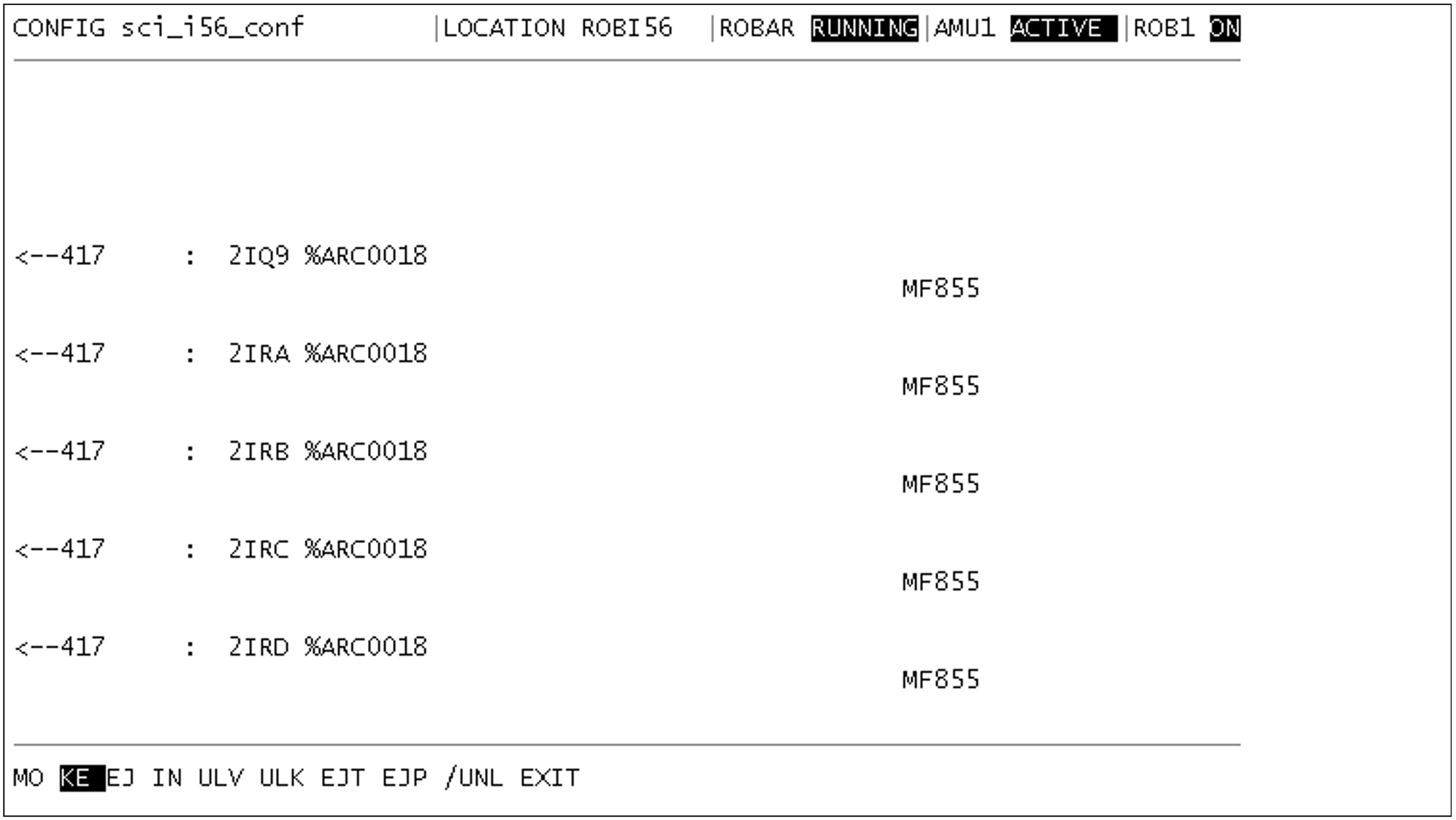
Figure 15: Menu for manual command input
General notes on the archive system commands
For the structure of the archive system commands, see the documentation of the manufacturer [15]. The mandatory operands of the archive system commands are represented by the following lowercase characters in the command displays and must be supplied with values:
| Archive system; permissible entries: 1 (single-robot system) |
| Robot number in the archive system command |
| Device mnemonic (in the case of 2-character BS2000 MNs) or |
| VSN of the volume |
| Archive system status byte |
| Source coordinate
|
| Target coordinate |
| Simulation mode for the archive system command |
The commands IN and IV (for importing MTCs) and the commands EJ, EJT, EJP (for exporting MTCs) are assigned an additional field that is blank by default. At the SCSI interface you can use this field, depending on how it is occupied (iii or eee), to perform MTC import/export for input/output areas that deviate from the predefined input/output areas:
| If you enter |
| If you enter |
You cannot change the operands represented by uppercase letters. These are return values from the archive system to ROBAR-SV.
Short description of the archive system commands
The archive system commands displayed by default in the menu bar of the MANUAL menu have the identifier H in column 10 of the interface-specific roboter_cmds file. The table below shows the name and brief description of all available archive system commands. Only some commands are supported in the MANUAL menu.
Archive system | Short description |
ACOM | Query robot status |
AOFF 1 | Shut down AMU |
AUTO | Deactivate robot simulation |
BON 1 | Switch on barcode check |
BOFF1 | Switch off barcode check |
CLU1 | Close device ld |
CVA2 3 | Pseudo archive system command to reset the fast mount attribute |
DL 1 | Update VSN and archive record entry for specified coordinate |
EJ1 4 | Move cartridge to output area (export). ABBA interface: the cartridge’s position in the archive is reserved, the archive record entry is retained. SCSI interface: the cartridge’s position in the archive is released, the archive record entry is deleted (like EJT). |
EJP1 2 4 | Generate a sequence of |
EJT1 2 4 | Move cartridge to output area (export); the cartridge’s position in the archive is released, the archive record entry is deleted |
EJTC1 | Move used cleaning cartridge to the output area (export) |
EXIT2 | Return to main menu |
IN1 4 | Move cartridge(s) from the output area to the archive |
INC1 | Check archive position for specified coordinate |
INSC1 2 | Move cleaning cartridge from the input area to the archive |
IVK1 | Check archive position for a specified coordinate range |
IVV1 | Check position of the specified VSN in the archive |
KE | Remove cartridge or cleaning cartridge from device |
KEC1 | Remove cartridge from device and move to specific storing position |
MAN1 | Activate robot simulation |
MO3 4 MOFM2 | Mount cartridge or cleaning cartridge on device |
Fast mount (for ETERNUS CS only) | |
MOCL1 | Mount cleaning cartridge on device (cartridge is automatically removed from the device after cleaning) |
MV1 | Move cartridge from source coordinate to target coordinate |
ROSA | Start robot |
ROSO1 | Stop robot |
SIN1 | Stop insert run |
SIVK1 | Stop inventory run |
ULU | Initiate emergency unload for specific MTC device |
ULV3 4 | Output archive record entry for a specific VSN |
ULK3 4 | Output archive record entry for a specific coordinate or for a specific MTC device |
UPV1 | Output archive record entry for a specific VSN |
UPK1 | Modify the status field in the archive record for the specified coordinate |
VI1 | Move individual cartridge from the input area to the archive |
VICC1 | Move individual cartridge from the specified input area coordinate to the target coordinate |
| Generate |
1 | Rejected by ETERNUS CS with return code N017 |
2 | Not a true archive system command |
3 | In the MANUAL menu with RRF ETERNUS CS (ABBA interface) |
4 | In the menu MANUAL with RRF SCSI (SCSI interface) |
Archive system command EJP
You can use the command EJP (eject pool) to export MTCs with a range of VSNs in ascending order. The EJP command is used to generate n archive system commands EJ (eject), where n is the number of cartridges.
To prevent the current ROBAR session from being blocked while the cartridges are exported, you can prioritize the EJP command. When you have issued the EJP command, you are asked for the priority of the command.
You may enter any of the following:
| The individual |
| The jobs are written to the job file with lower priority, i.e. all other jobs with higher or normal priority are executed first. |
| The individual jobs are issued without priority, i.e. high-priority jobs are executed before them and low-priority jobs after them. |
If MAREN is being used, it is informed about the export.
Archive system command MO
You use the MO (mount) command to mount an MTC on a specific MTC device. The following specifications in the ss field control the fast mount attribute for ETERNUS CS:
| Mount without fast mount attribute |
| Mount with fast mount attribute |