Wenn Sie MANUAL auswählen, dann verzweigen Sie in ein Menü, in dem Sie Archivsystem-Kommandos und das BS2000-Kommando /UNLOAD-TAPE manuell eingeben können. Die Archivsystem-Kommandos beziehen sich auf das Archivsystem, das die im Menü INSTANCES ausgewählten ROBAR-SV-Instanz verwaltet.
Die zur Verfügung stehenden Archivsystem-Kommandos unterscheiden sich je nach Schnittstelle. Entsprechend ausgezeichnete Kommandos werden in der letzten Zeile aufgelistet (siehe „MANUAL Archivsystem-Kommandos manuell eingeben“). Die Kommandos sind parametrisierbar (siehe „Datei roboter_cmds“).
Das ausgewählte Kommando wird mit seinen Operanden angezeigt, z.B. das Archivsystem-Kommando MO:
<M011,MO , ,FFFF,1,r,0mm,vvvvvv,ss,AAAAAAAA,BBBBBBBB,UUUUUUUU>
Die (klein geschriebenen) Operanden müssen Sie modifizieren (siehe „Allgemeine Hinweise zu den Archivsystem-Kommandos“) und mit [ENTER] bestätigen. Danach wird das Kommando mit der aktuellen Uhrzeit an das Archivsystem (/UNLOAD-TAPE an das entsprechende BS2000-System) geschickt und dort ausgeführt.
Sowohl die Archivsystem-Kommandos als auch die Archivsystem-Rückmeldungen werden in dem SCROLL-Bereich (Bildschirmzeile 3 - 23) protokolliert. Das Archivsystem meldet, ob das Kommando erfolgreich oder nicht erfolgreich ausgeführt wurde. Bei einer negativen Antwort wird zusätzlich ein Fehlerschlüssel mit ausgegeben.
Ein ausgewähltes Archivsystem-Kommando können Sie mit [Ctrl]+[C] zurücknehmen.
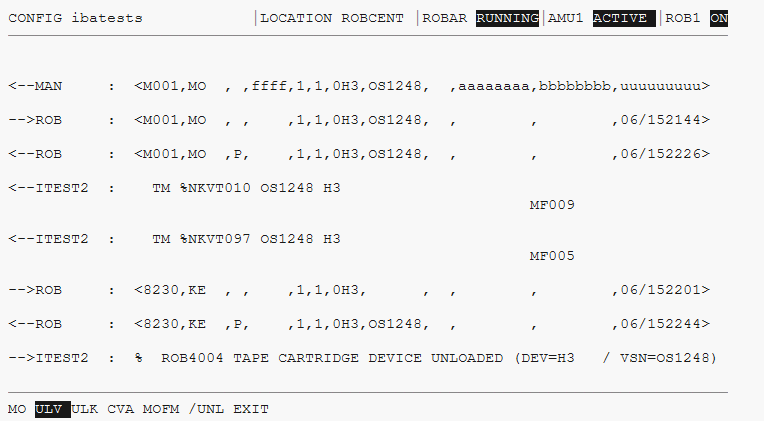
Bild 15: Menü zur manuellen Kommandoeingabe
Allgemeine Hinweise zu den Archivsystem-Kommandos
Der Aufbau der Archivsystem-Kommandos ist der Dokumentation des Herstellers zu entnehmen. Die zwingend benötigten Operanden der Archivsystem-Kommandos sind bei den Kommandoausgaben durch folgende Zeichen in Kleinbuchstaben dargestellt und müssen von Ihnen ersetzt werden:
| Archivsystem; zulässige Angaben: 1 (Einzelrobotersystem) |
| Roboternummer im Archivsystem-Kommando |
| Mnemotechnischer Gerätename (bei 2-stelligen BS2000-MNs) oder |
| Archivnummer (VSN) des Datenträgers |
| Archivsystem-Statusbyte |
| Quellkoordinate
|
| Zielkoordinate |
| Simulationsmodus im Archivsystem-Kommando |
Die Operanden, die durch Großbuchstaben dargestellt sind, können nicht verändert werden. Sie sind Rückgabewerte des Archivsystems an ROBAR-SV.
Kurzbeschreibung der Archivsystem-Kommandos
Die Archivsystem-Kommandos, die standardmäßig in der Menüleiste des Menüs MANUAL ausgegeben werden, besitzen in der Schnittstellen-spezifischen Datei roboter_cmds in Spalte 10 das Kennzeichen H. Folgende Tabelle enthält Name und Kurzbeschreibung aller verfügbaren Archivsystem-Kommandos. Nur ein Teil dieser Kommandos werden für die Virtual Tape Library ETERNUS CS unterstützt. Diese sind in der Tabelle markiert. Das Menü MANUAL enthält nur die unterstützten Kommandos.
Archivsystem-Kommando | Kurzbeschreibung |
ACOM | Abfragen des Roboterstatus |
AOFF 1 | AMU beenden |
AUTO | Robotersimulation ausschalten |
BON 1 | Barcode-Überprüfung einschalten |
BOFF1 | Barcode-Überprüfung ausschalten |
CLU1 | Geräteklappe schließen |
CVA2 3 | Pseudo-Archivsystem-Kommando zum Zurücksetzen des Fast-Mount-Attributs |
DL 1 | VSN und Archivspiegeleintrag für angegebene Koordinate aktualisieren |
EJ1 | Kassette in den Ausgabebereich bringen (Exportieren). |
EJP1 2 | Eine Sequenz von |
EJT1 2 | Kassette in den Ausgabebereich bringen (Exportieren); der Platz der Kassette im Archiv wird freigegeben, der Archivspiegeleintrag wird gelöscht |
EJTC1 | Verbrauchte Reinigungskassette in den Ausgabebereich bringen (Exportieren) |
EXIT2 | Rückkehr ins Hauptmenü |
IN1 | Kassette(n) aus dem Eingabebereich in das Archiv bringen |
INC1 | Position im Archiv für angegebene Koordinate überprüfen |
INSC1 2 | Reinigungskassette aus dem Eingabebereich in das Archiv bringen |
IVK1 | Positionen im Archiv für einen angegebenen Koordinatenbereich prüfen |
IVV1 | Position der angegebene VSN im Archiv überprüfen |
KE | Kassette oder Reinigungskassette aus MBK-Gerät entnehmen |
KEC1 | Kassette aus MBK-Gerät entnehmen und zu bestimmtem Stellplatz bringen |
MAN1 | Robotersimulation einschalten |
MO3 MOFM2 | Kassette oder Reinigungskassette auf MBK-Gerät montieren |
Fast-Mount | |
MOCL1 | Reinigungskassette auf MBK-Gerät montieren (Kassette wird nach der Reinigung automatisch aus dem Gerät entnommen) |
MV1 | Kassette von Quellkoordinate nach Zielkoordinate bringen |
ROSA | Roboter starten |
ROSO1 | Roboter anhalten |
SIN1 | Insert-Lauf anhalten |
SIVK1 | Inventur-Lauf anhalten |
ULU | Notentladen für bestimmtes MBK-Gerät veranlassen |
ULV3 | Archivspiegeleintrag für eine bestimmte VSN ausgeben |
ULK3 | Archivspiegeleintrag für eine bestimmte Koordinate oder ein bestimmtes MBK-Gerät ausgeben |
UPV1 | Statusfeld im Archivspiegel für angegebene VSN ändern |
UPK1 | Statusfeld im Archivspiegel für angegebene Koordinate ändern |
VI1 | Einzelne Kassette aus dem Eingabebereich ins Archiv bringen |
VICC1 | Einzelne Kassette aus der angegebenen Eingabebereichkoordinate zur Zielkoordinate bringen |
|
|
1 | Von ETERNUS CS mit Returncode N017 abgewiesen |
2 | Kein echtes Archivsystem-Kommando |
3 | Im MANUAL-Menü mit RRF ETERNUS CS (ABBA-Schnittstelle) |
Archivsystem-Kommando EJP
Mit dem Kommando EJP (Eject-Pool) können Sie Magnetbandkassetten eines Archivnummernkreises in aufsteigender Reihenfolge exportieren. Mit dem Kommando EJP werden n Archivsystem-Kommandos EJ (Eject) generiert, wobei n die Anzahl der Kassetten ist. Das Kommando EJP wird für ETERNUS CS nicht unterstützt.
Damit während des Exportierens der laufende ROBAR-Betrieb nicht blockiert wird, können Sie das Kommando EJP priorisieren. Nachdem Sie das Kommando EJP eingegeben haben, wird nach der Priorität des Kommandos gefragt.
Folgende Eingaben sind möglich:
| Die einzelnen |
| Die Aufträge werden mit niederer Priorität in die Auftragsdatei geschrieben, d.h. alle anderen Aufträge mit hoher oder normaler Priorität werden vorher ausgeführt. |
| Die einzelnen Aufträge werden ohne Priorisierung eingegeben, d.h. hochpriore Aufträge werden vorher, niederpriore Aufträge im Anschluss ausgeführt. |
Wenn MAREN im Einsatz ist, dann wird MAREN über den Export informiert.
Archivsystem-Kommando MO
Mit dem Kommando MO (Mount) veranlassen Sie, dass ein MBK auf einem bestimmten MBK-Gerät montiert wird. Folgende Angaben im ss-Feld steuern das Fast-Mount-Attribut für ETERNUS CS:
| Montieren ohne Fast-Mount-Attribut |
| Montieren mit Fast-Mount-Attribut |